Seeded Self-Assembly
Click to focus. When focused, press m to open the options menu.
Refresh the page to restart the simulation.
Overview
The Patchy Particle Self-Assembly tutorial uses a temperature ramp to improve the quality of the self-assembled structures. This tutorial demonstrates another technique to do the same. It places a small portion of the final crystal (a seed) and keeps it fixed during the simulation.
Refer to the Patchy Particle Self-Assembly tutorial for a complete description of the simulation model.
- Objectives:
- Explain how to fix certain bodies in place while applying trial moves to others.
- Demonstrate the self-assembly of patchy particles around a crystal seed.
- File:
hoomd-rs/examples/mc-tutorial/seeded-self-assembly.rs - Run (interactively):
cargo run --release --features "bevy" --example seeded-self-assembly - Run (in batch mode):
cargo run --release --example seeded-self-assembly
Use Declarations
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Type Aliases
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Construct the Simulation Model
Place the Crystal Seed
The kagome structure formed by these patchy particles consists of points placed on a honeycomb with the patches oriented tangent to a circle placed around each hexagon. One way to construct this is to start with one hexagon:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Then place another hexagonal ring of of these hexagons:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Constructing the second ring in this way duplicates some of the points. Add bodies to the microstate only when they do not overlap with existing bodies.
Populate the Simulation Model Struct
The first part of new() is similar to that in Patchy Particle Self-Assembly:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;The only difference is the removal of the temperature ramp.
Set the Initial State
After constructing the empty Microstate, call place_seed to place
the crystal seed:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Randomly Insert the Remaining Bodies
Use QuickInsert to randomly insert the rest of the bodies so that the total
number is equal to n_disks:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Finish Constructing the Simulation Model
The rest of the construction code is similar to that in Patchy Particle Self-Assembly:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;The only addition is that SeededSelfAssembly now has a seed_size field that
tracks the number of bodies in the crystal seed.
Implement the Simulation Phases
Initialize
QuickInsert, QuickCompress, and Apply Trial Moves
As in Patchy Particle Self-Assembly, the initialize() method inserts bodies
randomly, then compresses the simulation to the target density:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;To avoid moving the crystal seed, it applies trial moves with a filter that selects non-seed bodies:
#![allow(unused)]
fn main() {
|body| body.tag >= self.seed_size
}The filters operate on tagged bodies, so they have access to the body
tag (used here) and also the body’s properties (body.item.properties)
and sites (body.item.sites). The filter must be applied separately
in quick_compress.apply, translate_sweep.apply_with_filter, and
rotate_sweep.apply_with_filter.
Tune Trial Move Sizes
After initializing, tune the trial move sizes with the same filter:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;More Initialization
The remainder of the initialize method is identical to that in Patchy
Particle Self-Assembly:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Equilibrate
During the equilibration phase, apply trial moves with the same filter:
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Implement Simulation, Interactions, etc…
See the Patchy Particle Self-Assembly tutorial for a complete explanation of remaining example code (see also the complete code below).
Conclusion
This tutorial showed you how to seed self-assembly simulations with a reference crystal.
Navigate to the top of the page to see the simulation in action. Notice that the seed in the center does not move and that the kagome structure starts to grow more quickly than with the temperature ramp in Patchy Particle Self-Assembly. The seeded simulations are also more likely to form a single crystal grain:
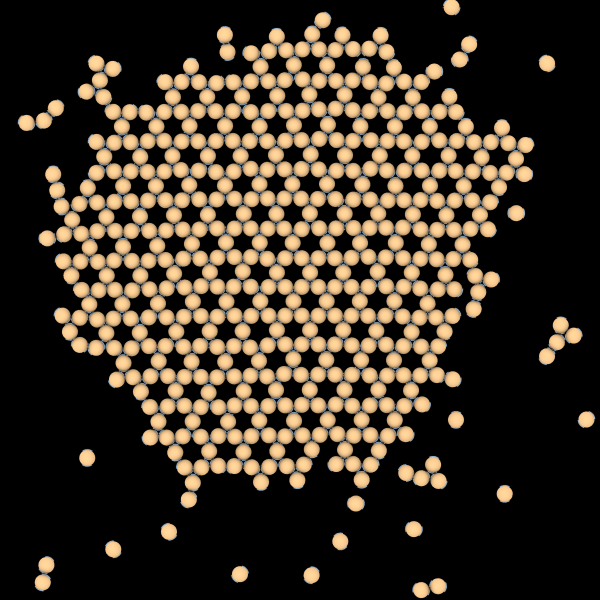
Complete Code
use std::f64::consts::PI;
use anyhow::{Context, anyhow};
use parquet_derive::ParquetRecordWriter;
use hoomd_geometry::{
Volume,
shape::{Circle, Rectangle},
};
use hoomd_interaction::{
DeltaEnergyInsert, MaximumInteractionRange, PairwiseCutoff, SitePairEnergy,
pairwise::{
AngularMask, Anisotropic, HardSphere, Isotropic, angular_mask::Patch,
},
univariate::{Boxcar, Expanded, OverlapPenalty},
};
use hoomd_mc::{
QuickCompress, QuickInsert, Rotate, Sweep, Translate, TuneOptions,
UniformIn,
};
use hoomd_microstate::{
Body, Microstate, SiteKey, boundary::Periodic, property::OrientedPoint,
};
use hoomd_simulation::{Simulation, macrostate::Isothermal};
use hoomd_spatial::VecCell;
use hoomd_vector::{Angle, Cartesian};
type PositionVector = Cartesian<2>;
type Orientation = Angle;
type BodyProperties = OrientedPoint<PositionVector, Orientation>;
type SiteProperties = OrientedPoint<PositionVector, Orientation>;
impl SeededSelfAssembly {
/// Place a crystal seed in the microstate.
fn place_seed(
microstate: &mut Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
hamiltonian: &PairwiseCutoff<SitePairInteraction>,
) -> anyhow::Result<()> {
let r = 1.03;
let hexagon: Vec<_> = (0..6)
.map(|i| {
let theta = 2.0 * PI * (i as f64) / 6.0;
OrientedPoint {
position: Cartesian::from([
r * theta.cos(),
r * theta.sin(),
]),
orientation: Angle::from(theta),
}
})
.collect();
for oriented_point in &hexagon {
microstate.add_body(Body {
properties: *oriented_point,
sites: vec![SiteProperties::default()],
})?;
}
for i in 0..6 {
let theta = 2.0 * PI * (i as f64) / 6.0;
for oriented_point in &hexagon {
let new_oriented_point = OrientedPoint {
position: oriented_point.position
+ Cartesian::from([
2.0 * r * theta.cos(),
2.0 * r * theta.sin(),
]),
..*oriented_point
};
let new_body = Body {
properties: new_oriented_point,
sites: vec![SiteProperties::default()],
};
let delta_e =
hamiltonian.delta_energy_insert(microstate, &new_body);
if delta_e.is_finite() {
microstate.add_body(new_body)?;
}
}
}
Ok(())
}
/// Construct a new seeded self-assembly simulation.
fn new() -> anyhow::Result<SeededSelfAssembly> {
let initial_packing_fraction = 0.3;
let target_packing_fraction = 0.3;
let n_disks = 512;
let maximum_distance = 0.07;
let maximum_rotation = 0.04;
let sigma = 1.0;
let patch_interaction_range = 1.12;
let patch_half_angle = 37.0_f64.to_radians();
let patch_energy = -5.8;
let macrostate = Isothermal { temperature: 1.0 };
let hard_disk = HardSphere { diameter: sigma };
let boxcar = Boxcar {
epsilon: patch_energy,
left: 0.0,
right: patch_interaction_range,
};
let masks = [
Patch {
director: [0.0, 1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
Patch {
director: [0.0, -1.0].try_into()?,
cos_delta: patch_half_angle.cos(),
},
];
let angular_mask = Anisotropic {
interaction: AngularMask::new(boxcar, masks),
r_cut: patch_interaction_range,
};
let hamiltonian = PairwiseCutoff(SitePairInteraction {
hard_disk,
angular_mask,
});
let overlap_penalty = Isotropic {
interaction: Expanded {
delta: sigma,
f: OverlapPenalty::default(),
},
r_cut: sigma,
};
let overlap_penalty_hamiltonian = PairwiseCutoff(overlap_penalty);
let circle = Circle {
radius: (sigma / 2.0).try_into()?,
};
let initial_box_volume =
n_disks as f64 * circle.volume() / initial_packing_fraction;
let initial_box_edge_length = initial_box_volume.sqrt();
let square =
Rectangle::with_equal_edges(initial_box_edge_length.try_into()?);
let periodic_square =
Periodic::new(hamiltonian.maximum_interaction_range(), square)?;
let vec_cell = VecCell::builder()
.nominal_search_radius(
hamiltonian.maximum_interaction_range().try_into()?,
)
.build();
let mut microstate = Microstate::builder()
.boundary(periodic_square)
.spatial_data(vec_cell)
.try_build()?;
Self::place_seed(&mut microstate, &hamiltonian)?;
let distribution = UniformIn {
boundary: microstate.boundary().clone(),
template_sites: vec![SiteProperties::default()],
};
let quick_insert =
QuickInsert::new(distribution, n_disks - microstate.bodies().len());
let translate =
Translate::with_maximum_distance(maximum_distance.try_into()?);
let translate_sweep = Sweep(translate);
let rotate =
Rotate::with_maximum_rotation(maximum_rotation.try_into()?);
let rotate_sweep = Sweep(rotate);
let target_box_volume =
n_disks as f64 * circle.volume() / target_packing_fraction;
let quick_compress =
QuickCompress::with_target_volume(target_box_volume.try_into()?);
Ok(SeededSelfAssembly {
seed_size: microstate.bodies().len(),
microstate,
overlap_penalty_hamiltonian,
hamiltonian,
translate_sweep,
rotate_sweep,
quick_insert,
quick_compress,
macrostate,
phase: Phase::Initialize,
})
}
}
impl SeededSelfAssembly {
fn initialize(&mut self) -> anyhow::Result<()> {
if self.quick_insert.is_complete() {
self.quick_compress.apply(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
|body| body.tag >= self.seed_size,
);
} else {
self.quick_insert
.apply(&mut self.microstate, &self.overlap_penalty_hamiltonian);
}
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.overlap_penalty_hamiltonian,
&Isothermal { temperature: 1.0 },
|body| body.tag >= self.seed_size,
);
if self.quick_compress.is_complete() {
self.translate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.tune_with_options_and_filter(
&self.microstate,
&self.hamiltonian,
&self.macrostate,
&TuneOptions::default(),
|body| body.tag >= self.seed_size,
);
self.phase = Phase::Equilibrate;
println!(
"Initialization complete at step {}.",
self.microstate.step()
);
}
if self.step() >= 20_000 {
let n = self.microstate.bodies().len();
let target_n = self.quick_insert.target();
let volume = self.microstate.boundary().volume();
let target_volume = self.quick_compress.target_volume();
return Err(anyhow!(
"inserted {n}/{target_n} bodies and compressed to {volume} / {target_volume}"
));
}
Ok(())
}
fn equilibrate(&mut self) {
self.translate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
self.rotate_sweep.apply_with_filter(
&mut self.microstate,
&self.hamiltonian,
&self.macrostate,
|body| body.tag >= self.seed_size,
);
}
}
#[cfg_attr(feature = "bevy", derive(Resource))]
struct SeededSelfAssembly {
/// Positions of all the bodies in the simulation.
microstate: Microstate<
BodyProperties,
SiteProperties,
VecCell<SiteKey, 2>,
Periodic<Rectangle>,
>,
/// How sites interact with other sites and fields.
hamiltonian: PairwiseCutoff<SitePairInteraction>,
/// Trial moves to apply.
translate_sweep: Sweep<Translate<PositionVector>>,
/// Trial moves to apply.
rotate_sweep: Sweep<Rotate<Orientation>>,
/// Temperature set point.
macrostate: Isothermal,
/// Quick insert algorithm.
quick_insert: QuickInsert<UniformIn<SiteProperties, Periodic<Rectangle>>>,
/// Quick compress algorithm
quick_compress: QuickCompress<Periodic<Rectangle>>,
/// How sites interact during compression.
overlap_penalty_hamiltonian:
PairwiseCutoff<Isotropic<Expanded<OverlapPenalty>>>,
/// The current phase of the simulation.
phase: Phase,
/// Number of bodies in the seed.
seed_size: usize,
}
enum Phase {
Initialize,
Equilibrate,
}
impl Simulation for SeededSelfAssembly {
/// Advance the simulation forward one step.
fn advance(&mut self) -> anyhow::Result<()> {
match self.phase {
Phase::Initialize => {
self.initialize().context("failed to initialize")?
}
Phase::Equilibrate => self.equilibrate(),
}
self.microstate.increment_step();
Ok(())
}
/// Get the current simulation step.
fn step(&self) -> u64 {
self.microstate.step()
}
}
#[derive(MaximumInteractionRange, SitePairEnergy)]
struct SitePairInteraction {
hard_disk: HardSphere,
angular_mask: Anisotropic<AngularMask<Boxcar, PositionVector>>,
}
/// A single entry in the log.
#[derive(ParquetRecordWriter)]
pub struct LogRecord {
/// The simulation step.
step: u64,
/// Total system potential energy.
potential_energy: f64,
/// Temperature.
temperature: f64,
}
// Remove the cfg(not(...)) line when using this code outside the hoomd-rs/examples directory.
#[cfg(not(feature = "bevy"))]
fn main() -> anyhow::Result<()> {
use hoomd_gsd::hoomd::HoomdGsdFile;
use hoomd_interaction::TotalEnergy;
use hoomd_microstate::AppendMicrostate;
use hoomd_utility::data::ParquetLogger;
let mut parquet_logger =
ParquetLogger::<LogRecord>::create("seeded-self-assembly.parquet")?;
let mut simulation = SeededSelfAssembly::new()?;
let mut hoomd_gsd_file = HoomdGsdFile::create("seeded-self-assembly.gsd")?;
for _ in 0..1_000_000 {
simulation.advance()?;
if simulation.step().is_multiple_of(10_000) {
hoomd_gsd_file
.append_microstate(&simulation.microstate)?
.end()?;
}
if simulation.step().is_multiple_of(1_000) {
parquet_logger.log(LogRecord {
step: simulation.microstate.step(),
potential_energy: simulation
.hamiltonian
.total_energy(&simulation.microstate),
temperature: simulation.macrostate.temperature,
})?;
}
}
Ok(())
}
#[cfg(feature = "bevy")]
mod seeded_self_assembly_interactive;
#[cfg(feature = "bevy")]
use bevy::prelude::Resource;
#[cfg(feature = "bevy")]
use seeded_self_assembly_interactive::main;Development of hoomd-rs is led by the Glotzer Group at the University of Michigan.
Copyright © 2024-2026 The Regents of the University of Michigan.
